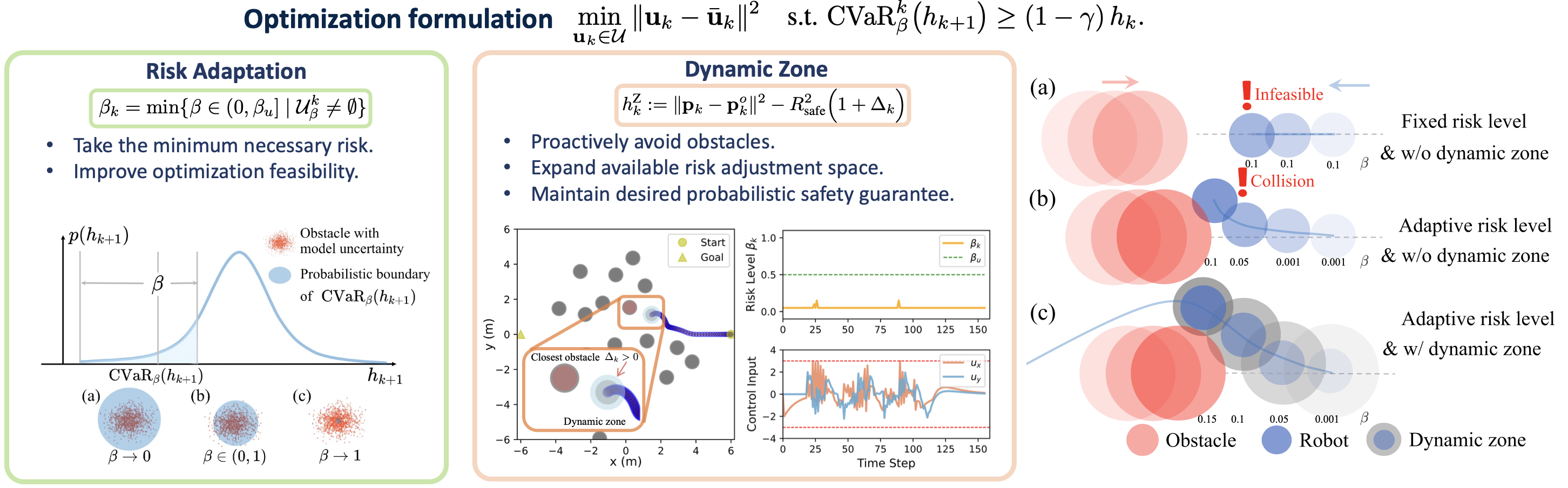
We propose a risk-adaptive approach that combines the Conditional Value-at-Risk Barrier Function Constraint, which automatically adjusts risk to balance safety and feasibility, with a dynamic zone-based barrier function that evaluates collision likelihood from relative states, enabling adaptive safety margin expansion and proactive obstacle avoidance.