
Multi-robot Search and Coverage for Infrausture Inspection
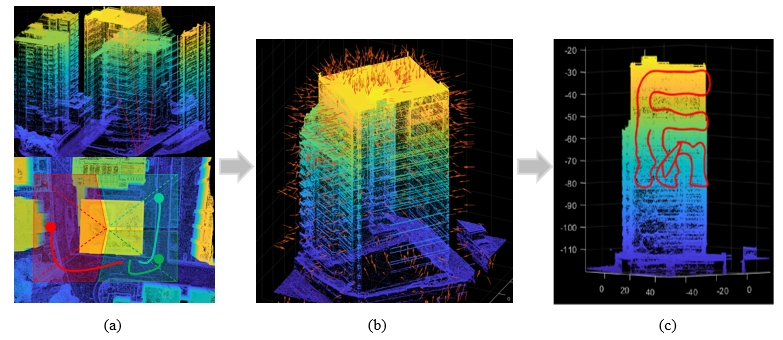
This work presents a fast and secure distributed coverage control algorithm to enable a multi-agent system to cooperatively inspect and reconstruct infrastructure. 1) a group of agents is tasked with exploring partially known areas to survey the surface of the target infrastructure and perceiving obstacles continuously. They need to cooperatively seek load-balanced deployment in real-time to improve the efficiency of coverage. 2) gradually perceived obstacles might stop the agent from exploring the environments or cause unpredictable damage to the agents.
References:
[1] Fast and Secure Distributed Multi-agent Coverage Control with An Application to Infrastructure Inspection and Reconstruction. X. Wang*, C. Gao, X. Chen, B. M. Chen. Chinese Control Conference (CCC), 2023, Guan Zhao-Zhi Award Finalist. [PDF] [Video]