Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
References:
[1] Quadrotor trajectory planning for visibility-aware target following. L. Xi#, X. Wang#, Ding Y, Y. Wei, Z. Peng*, B. M. Chen. IEEE International Conference on Robotics and Biomimetics (ROBIO), 2021. [PDF] [Video]
[1] Decentralized MPC-based trajectory generation for multiple quadrotors in cluttered environments. X. Wang, L. Xi, Y. Chen, S. Lai*, F. Lin, B. M. Chen. Guidance, Navigation and Control, 2021, 1(02): 2150007. [PDF] [Video]
[2] GTO-MPC-Based Target Chasing Using a Quadrotor in Cluttered Environments. L. Xi, X. Wang, L. Jiao, S. Lai, Z. Peng*, B. M. Chen. IEEE Transactions on Industrial Electronics (TIE), 2021, 69(6): 6026-6035. [PDF] [Video]
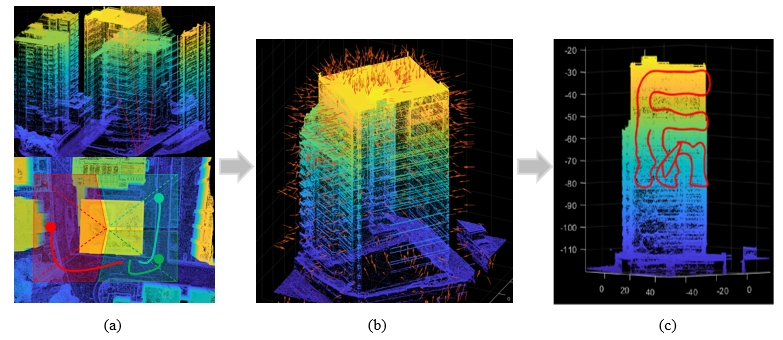
This work presents a fast and secure distributed coverage control algorithm to enable a multi-agent system to cooperatively inspect and reconstruct infrastructure. 1) a group of agents is tasked with exploring partially known areas to survey the surface of the target infrastructure and perceiving obstacles continuously. They need to cooperatively seek load-balanced deployment in real-time to improve the efficiency of coverage. 2) gradually perceived obstacles might stop the agent from exploring the environments or cause unpredictable damage to the agents.
References:
[1] Fast and Secure Distributed Multi-agent Coverage Control with An Application to Infrastructure Inspection and Reconstruction. X. Wang*, C. Gao, X. Chen, B. M. Chen. Chinese Control Conference (CCC), 2023, Guan Zhao-Zhi Award Finalist. [PDF] [Video]
In this work, a decentralized control policy to encircle and capture an evader is introduced, which allows pursuers to efficiently trap the evader, increasing greater chance of a successful capture in large, open, obstacle-rich areas with random initial configurations.
References:
[1] OA-ECBVC: A Cooperative Collision-free Encirclement and Capture Approach in Cluttered Environments. X. Wang, Y. Ding, Y. Chen, R. Han, L. Xi*, B. M. Chen. IEEE Conference on Decision and Control (CDC), 2023. [PDF] [Video]
[2] Distributed Encirclement and Capture of Multiple Pursuers with Collision Avoidance. X. Wang, L. Xi, Y. Ding*, B. M. Chen. IEEE Transactions on Industrial Electronics (TIE), 2023. [PDF] [Video]
Multi-agent systems have increasingly become instrumental in tackling search and coverage problems. However, the challenge of optimizing task efficiency without compromising task success still persists, particularly in expansive, unstructured environments with dense obstacles. This work presents an innovative, decentralized geometric separation based controller for search and coverage to reactively navigate these complexities while maintaining safety without deadlock.
References:
[1] Sensor-based Multi-Robot Coverage Control with Spatial Separation in Unstructured Environments. X. Wang, J. Xu, C. Gao, Y. Chen, J. Zhang, C. Wang*, B. M. Chen. IEEE International Conference on Robotics and Automation (ICRA) 2024. [PDF] [Video]
Model-based CBFs enforce formal safety in known environments but falter amid unpredictable obstacles. To overcome this, I introduce a runtime risk‑adaptive CVaR‑BF—augmented by a Dynamic Zone‑Based BF—that auto‑tunes its risk threshold to the minimum necessary, balancing safety and feasibility under uncertainty. Reinforcement‑learning (RL) controllers excel at discovering socially compliant motion patterns but may fail catastrophically when confronted with new pedestrian behaviors. I then layer this CVaR‑BF as a real‑time safety filter on an RL nominal planner, making the smallest adjustments needed to keep the worst‑case collision risk below a user‑specified bound—preserving the RL policy’s efficiency while providing probabilistic safety guarantees. It has been tested on a real social navigation dataset.
References:
[1] Safe Navigation in Uncertain Crowded Environments Using Risk Adaptive CVaR Barrier Functions. X. Wang, T. Kim, B. Hoxha, G. Fainekos, D. Panagou. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), under review, 2025. [PDF] [Video]
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.